stm32的启动模式
STM32三种启动模式对应的存储介质均是芯片内置的,它们分别是:
1)用户闪存 = 芯片内置的Flash。
2)SRAM = 芯片内置的RAM区,就是内存啦。
3)系统存储器 = 芯片内部一块特定的区域,芯片出厂时在这个区域预置了一段Bootloader,就是通常说的ISP程序。这个区域的内容在芯片出厂后没有人能够修改或擦除,即它是一个ROM区。
在每个STM32的芯片上都有两个管脚BOOT0和BOOT1,这两个管脚在芯片复位时的电平状态决定了芯片复位后从哪个区域开始执行程序,见下表: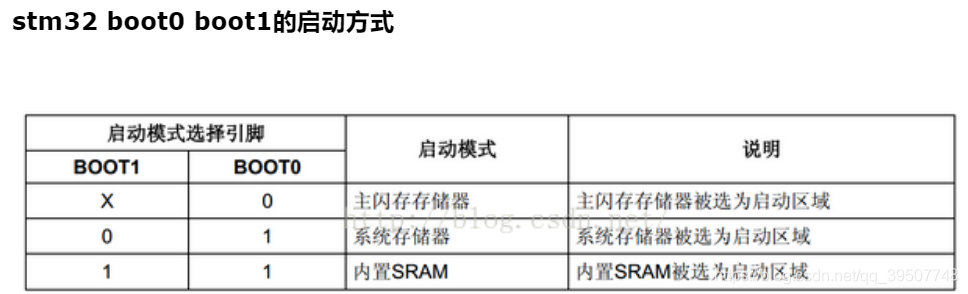
1、Main Flash memory
是STM32内置的Flash,一般我们使用JTAG或者SWD模式下载程序时,就是下载到这个里面,重启后也直接从这启动程序。
2、System memory
从系统存储器启动,这种模式启动的程序功能是由厂家设置的。一般来说,我们选用这种启动模式时,是为了从串口下载程序,因为在厂家提供的BootLoader中,提供了串口下载程序的固件,可以通过这个BootLoader将程序下载到系统的Flash中。但是这个下载方式需要以下步骤:
Step1:将BOOT0设置为1,BOOT1设置为0,然后按下复位键,这样才能从系统存储器启动BootLoader
Step2:最后在BootLoader的帮助下,通过串口下载程序到Flash
Step3:程序下载完成后,又有需要将BOOT0设置为GND,手动复位,这样,STM32才可以从Flash中启动
可以看到,利用串口下载程序还是比较的麻烦,需要跳帽跳来跳去的,非常的不注重用户体验。
3、Embedded Memory
内置SRAM,既然是SRAM,自然也就没有程序存储的能力了,这个模式一般用于程序调试。假如我只修改了代码中一个小小的地方,然后就需要重新擦除整个Flash,比较的费时,可以考虑从这个模式启动代码(也就是STM32的内存中),用于快速的程序调试,等程序调试完成后,再将程序下载到Flash中。
要注意的是,一般不使用内置SRAM启动(BOOT1=1,BOOT0=1),因为SRAM掉电后数据就丢失。多数情况下SRAM只是在调试时使用,也可以做其他一些用途。如做故障的局部诊断,写一段小程序加载到SRAM中诊断板上的其他电路,或用此方法读写板上的Flash或EEPROM等。还可以通过这种方法解除内部Flash的读写保护,当然解除读写保护的同时Flash的内容也被自动清除,以防止恶意的软件拷贝。
一般BOOT0和BOOT1跳线都跳到0(地)
顺便说一下STM32 启动过程:
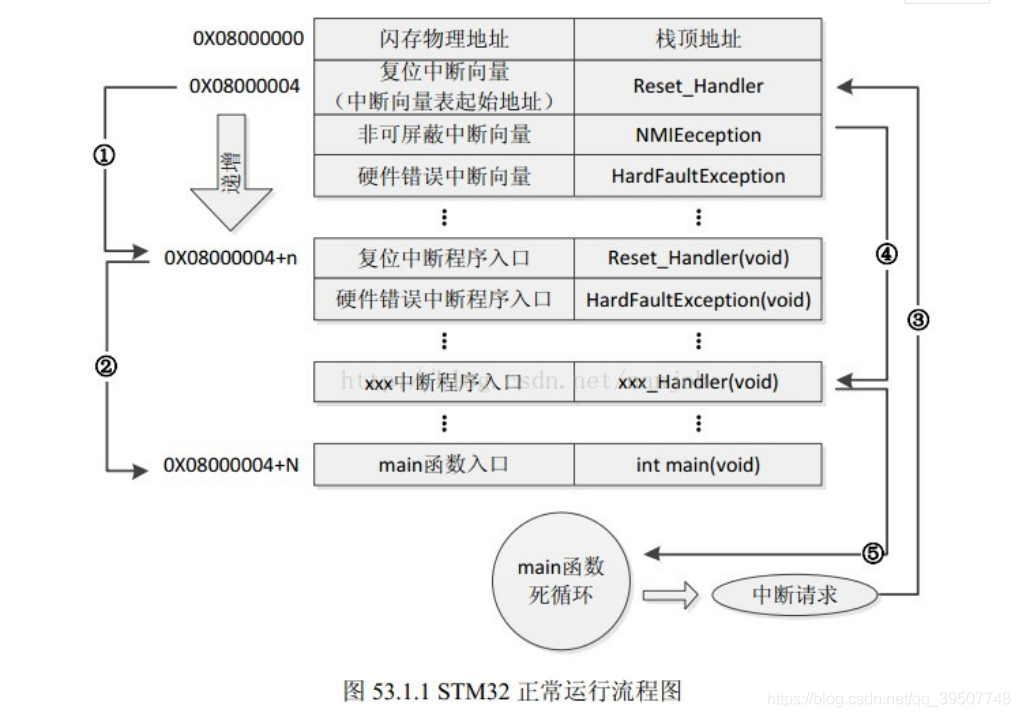
STM32的内部闪存(flash)地址起始于0x08000000,一般情况下,程序文件就从地址开始写入,此外STM32是基于Cortex-M3内核的微控制器,其内部通过一张中断向量表来响应。程序启动后,首先从"中断向量表"取出复位中断向量执行复位中断程序完成启动,而这张"中断向量表"的起始地址是0x8000004,当中断来临,STM32的内部硬件机制会自动将PC指针定位到中断向量表处,并根据中断源取出对应的中断向量执行中断服务程序。
在图53.1.1,STM32 在复位后,先从0x08000004地址取出复位中断向量的地址,并跳转到复位中断服务程序,如标号①所示,在复位中断执行完后,会跳转到我们的Main函数,如标号②所示,而我们的main一般都是一个死循环,在main函数执行过程中,如果收到中断请求,此时STM32强制将PC指针指回中断向量表处,如标号③所示,然后,根据中断源进入相应的中断服务程序,如标号④所示,在执行完中断服务以后,程序再次返回main函数执行,如标号5⑤所示
 正点原子STM32 ISP下载一般步骤和程序执行步骤
正点原子STM32 ISP下载一般步骤和程序执行步骤
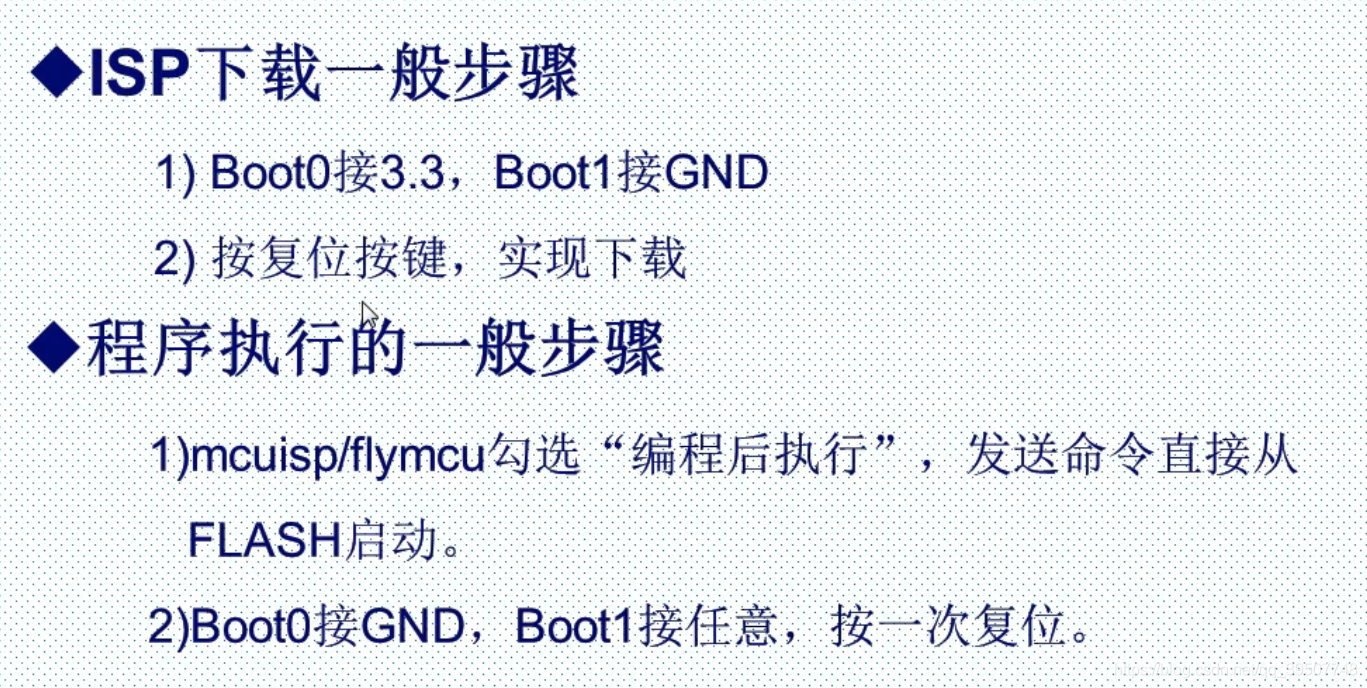
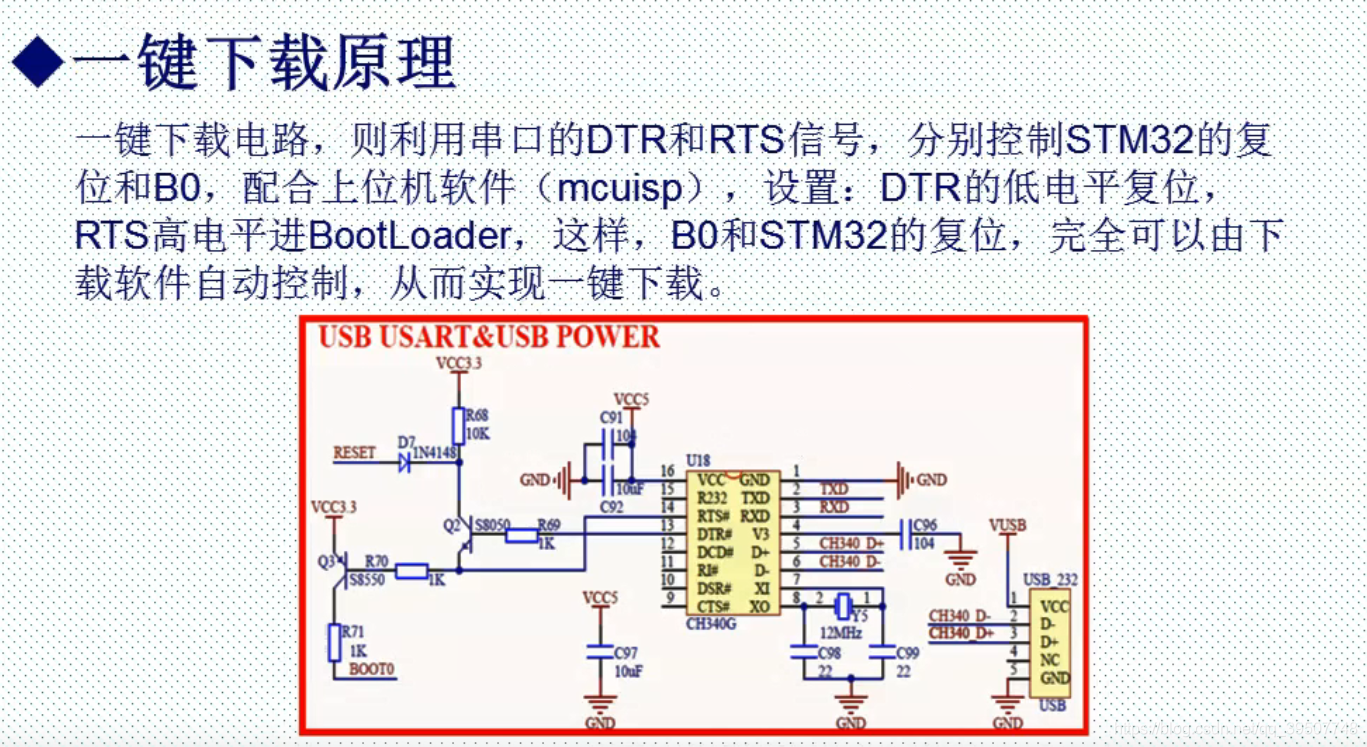
但是由于下载电路采用一键下载方案,如下图所示,所以我们只需要在刚开始的时候就设置BOOT0/BOOT1都为0即可,后面不需要再修改了
8种IO口模式
输入模式
-输入浮空(GPIO_Mode_IN_FLOATING) -输入上拉(GPIO_Mode_IPU)
-输入下拉(GPIO_Mode_IPD) -模拟输入(GPIO_Mode_AIN)
输出模式
-开漏输出(GPIO_Mode_Out_OD) -开漏复用功能(GPIO_Mode_AF_OD)
-推挽式输出(GPIO_Mode_Out_PP) -推挽式复用功能(GPIO_Mode_AF_PP)
| 4种输入模式 | 4种输出模式 (带上拉或者下拉) |
|---|---|
| 浮空输入 | 推挽输出 |
| 上拉输入 | 复用式推挽输出 |
| 下拉输入 | 开漏输出 |
| 模拟输入 | 复用式开漏输出 |
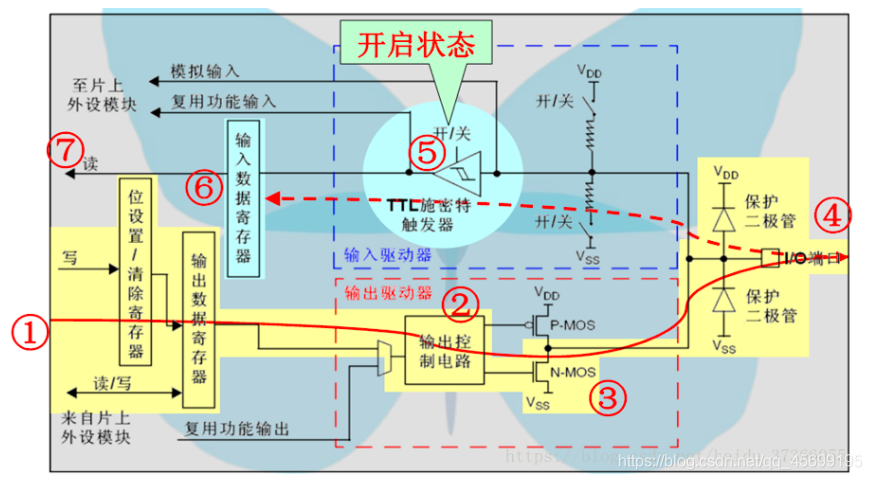
1、浮空输入
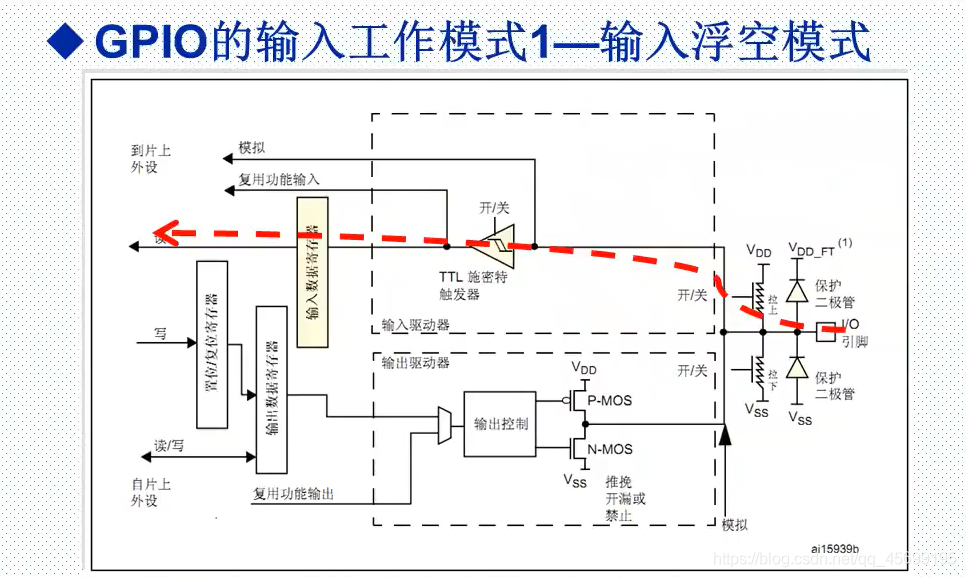
浮空输入模式下,I/O端口的电平信号直接进入输入数据寄存器。MCU直接读取I/O口电平,I/O的电平状态是不确定的,完全由外部输入决定;如果在该引脚悬空(在无信号输入)的情况下,读取该端口的电平是不确定的,一般多用于外部按键输入。
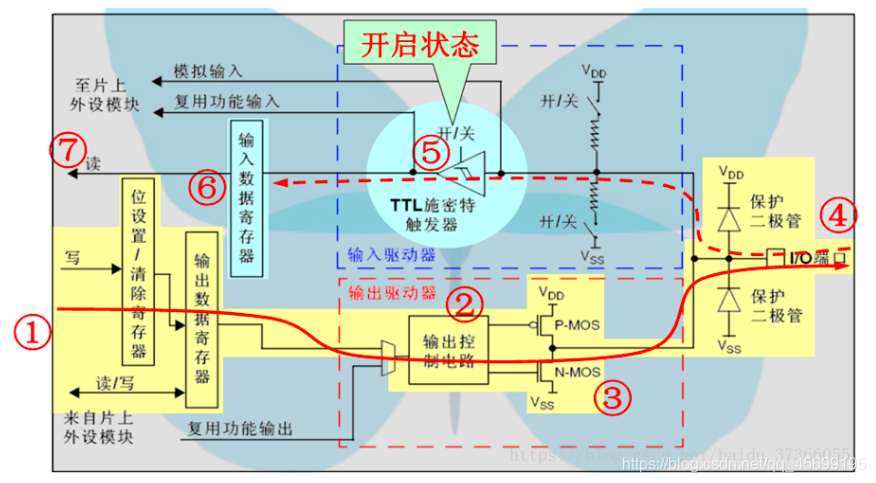
2、上拉输入
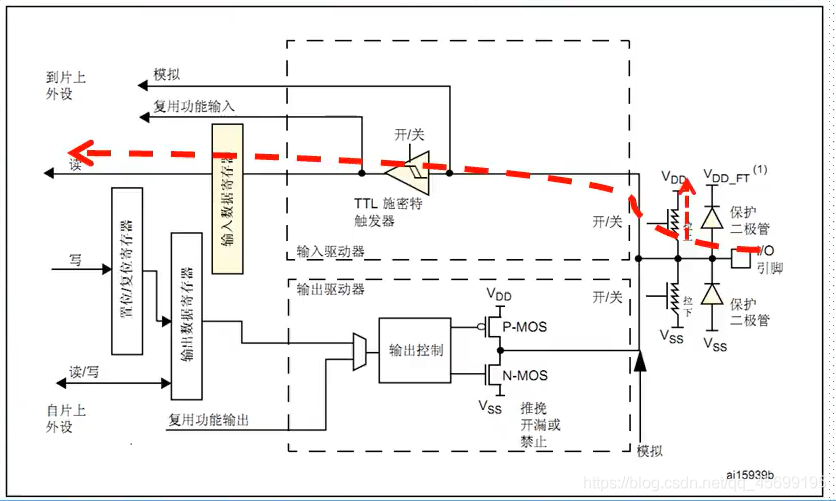
IO内部接上拉电阻,此时如果IO口外部没有信号输入或者引脚悬空,IO口默认为高电平 如果I/O口输入低电平,那么引脚就为低电平,MCU读取到的就是低电平
3、下拉输入
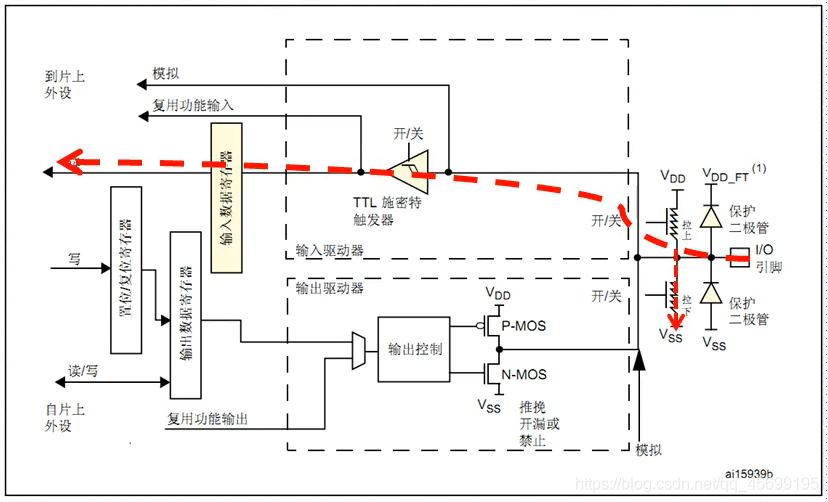
IO内部接下拉电阻,此时如果IO口外部没有信号输入或者引脚悬空,IO口默认为低电平 如果I/O口输入高电平,那么引脚就为高电平,MCU读取到的就是高电平
4、模拟输入
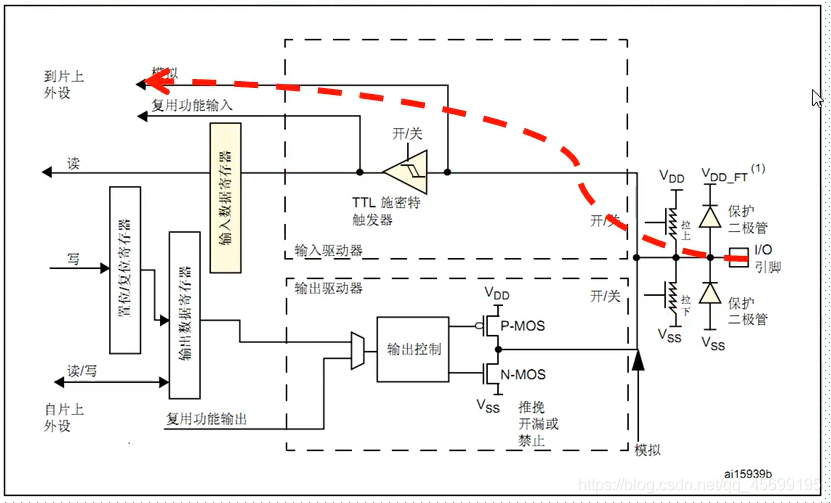
将引脚设置为stm32内部的adc的模拟信号的输入,需要带adc的io口才能设置。
5、开漏输出
输出端相当于三极管的集电极,要得到高电平状态需要上拉电阻才行,适合于做电流型的驱动,其吸收电流的能力相对强(一般20mA以内)
IO输出0接GND,IO输出1,悬空,需要外接上拉电阻,才能实现输出高电平。当输出为1时,IO口的状态由上拉电阻拉高电平
6、推挽输出
在推挽输出模式时,N-MOS管和P-MOS管都工作,如果我们控制输出为0,低电平,则P-MOS管关闭,N-MOS管导通,使输出低电平,I/O端口的电平就是低电平,若控制输出为1 高电平,则P-MOS管导通N-MOS管关闭,使输出高电平,I/O端口的电平就是高电平, 外部上拉和下拉的作用是控制在没有输出时IO口电平
此时施密特触发器是打开的,即输入可用,通过输入数据寄存器GPIOx_IDR可读取I/O的实际状态。I/O口的电平一定是输出的电平推挽输出输出0-接GND, IO输出1 -接VCC,读输入是未知的。
推挽输出和开漏输出的区别
| 推挽输出 | 开漏输出 |
|---|---|
| 可以输出强高低电平,连接数字器件 | 可以输出强低电平,高电平得靠外部电阻拉高。输出端相当于三极管的集电极. 需要外接上拉电阻,才能实现输出高电平 合于做电流型的驱动,其吸收电流的能力相对强(一般20ma以内);在使用任何一种开漏模式时,都需要接上拉电阻,否则只能输出低电平 |
| 推挽输出电路: 其中IN端输出高电平时下面的PNP三极管截止,而上面NPN三极管导通,输出电平VS+;当IN端输出低电平时则恰恰相反,PNP三极管导通,输出和地相连,为低电平 | 开漏输出电路:IN端输出低电平时,三极管导通,使输出接地,IN端输出高电平时,三极管截止,所以引脚既不输出高电平,也不输出低电平,为高阻态。为正常使用时必须接上拉电阻 |
在STM32的应用中,除了必须用开漏模式的场合,我们都习惯使用推挽输出模式。
7、开漏复用输出
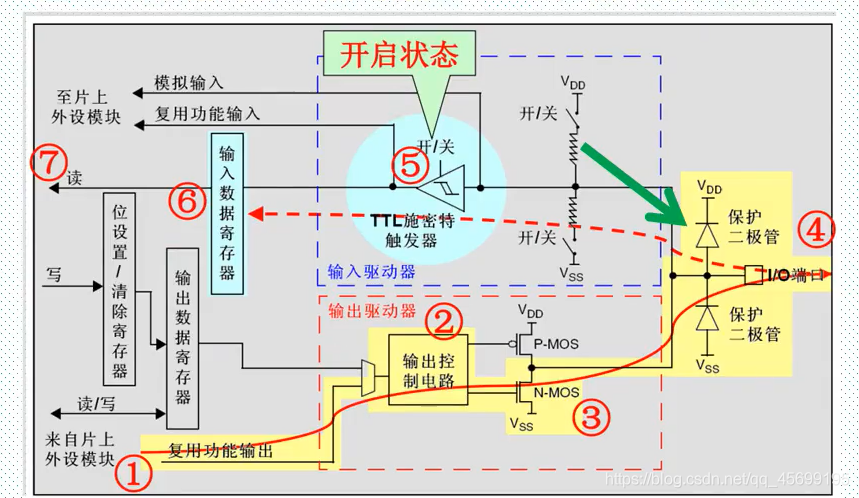
输出的高低电平的来源于其它外设,施密特触发器打开,输入可用,通过输入数据寄存器可获取I/O实际状态 除了输出信号的来源改变 其他与开漏输出功能相同
可以理解为GPIO口被用作第二功能时的配置情况(即并非作为通用IO口使用)
8、推挽复用输出
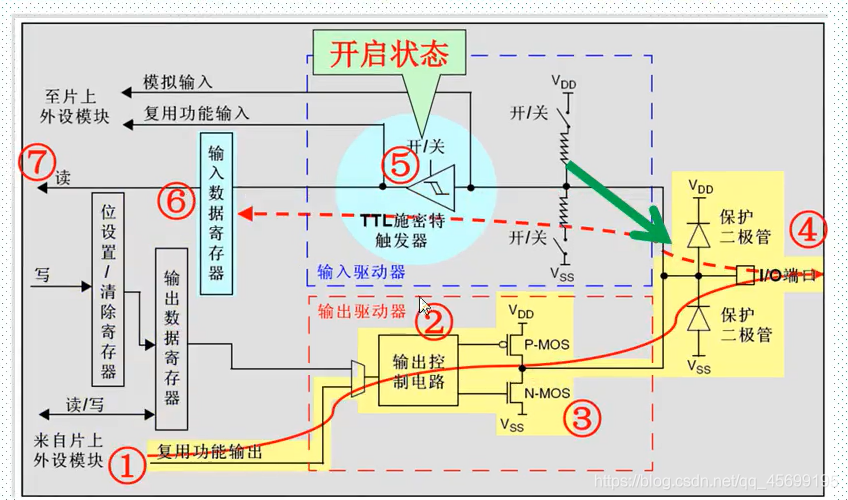
可以理解为GPIO口被用作第二功能时的配置情况(即并非作为通用IO口使用)
F4系列与F1系列区别:
本质上的区别是F4系列采用了Cortex-M4内核 ,而F1系列采用Cortex-M3内核
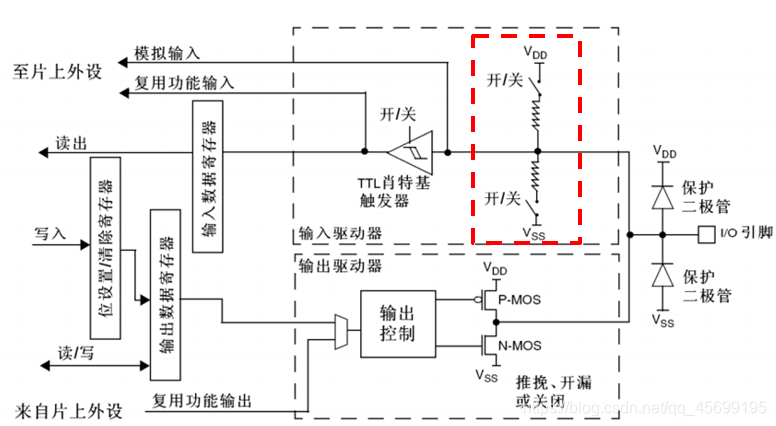
F1系列(M3)IO口基本结构:
F4系列(M4)IO口基本结构:
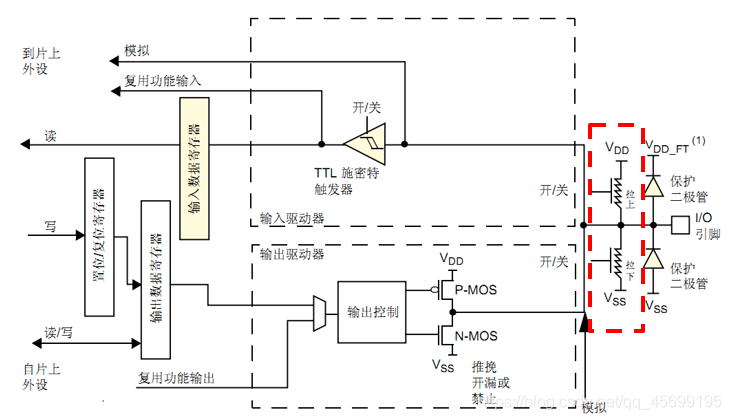
F4系列设计的更加高级与人性化,他将外部上下拉电阻转移到了输出/输入驱动器外部,使得输出模式下也可以实现内部上拉与下拉,方便了用户的使用,增加了灵活性。
引脚模式的配置方式如下:
1、作为普通GPIO输入:根据需要配置该引脚为浮空输入、带弱上拉输入或带弱下拉输入,同时不要使能该引脚对应的所有复用功能模块。
2、作为普通GPIO输出:根据需要配置该引脚为推挽输出或开漏输出,同时不要使能该引脚对应的所有复用功能模块。
3、作为普通模拟输入:配置该引脚为模拟输入模式,同时不要使能该引脚对应的所有复用功能模块。
4、作为内置外设的输入:根据需要配置该引脚为浮空输入、带弱上拉输入或带弱下拉输入,同时使能该引脚对应的某个复用功能模块。
5、作为内置外设的输出:根据需要配置该引脚为复用推挽输出或复用开漏输出,同时使能该引脚对应的所有复用功能模块。



- 本文链接:https://www.darkfox.top/posts/b900f0d0/
- 版权声明:本博客所有文章除特别声明外,均默认采用 许可协议。